
บทความชวนดูงานศิลปะและนวัตกรรมจากโลกที่หนึ่ง ที่สร้างการเปลี่ยนแปลงในทางที่ดีให้สังคมและชีวิตคน ผ่านสายตานักออกแบบมัลติมีเดียจากโลกที่สามในนามกลุ่ม Eyedropper Fill
Eyedropper Fill เรื่อง
ตอนอายุ 8 ขวบ ผมได้รู้จักหุ่นยนต์ตัวเป็นๆ ตัวแรกของโลกอย่าง ‘อาซิโม’ ทางโทรทัศน์ จำได้ว่าตอนนั้นเวลาดูข่าวอาซิโมเดินทางไปเยี่ยมใครหรือโชว์ตัวที่ไหน ก็จะเห็นภาพการจับมือกันระหว่างอาซิโมกับมนุษย์ซักคน
ภาพการเชคแฮนด์ราวกับเป็นหมุดหมายที่ยืนยันว่า ยุคสมัยที่มนุษยชาติต้องอยู่ร่วมโลกกับหุ่นยนต์กำลังเริ่มต้นขึ้น ณ บัดนาว

ผมไม่เคยจับมือกับอาซิโม แต่พอจะจินตนาการได้ว่าการจับมือกับหุ่นยนต์คงให้ความรู้สึกไม่หนีจากตอนสัมผัสเครื่องใช้ไฟฟ้าที่บ้าน คงแข็งและเย็น ฝ่ายอาซิโมเองก็คงไม่รู้สึกว่ามือของผมนุ่มนิ่ม และกำลังเปียกเล็กน้อยจากความตื่นเต้น
20 ปีผ่านไป เรากำลังอยู่ในยุคที่คนเป็นเพื่อนกับหุ่นยนต์และมีจักรกลติดปัญญาประจำครัวเรือน ลูกหลานหุ่นยนต์ที่เราเห็นในวันนี้มีหน้าตาหลากหลาย สติปัญญาล้ำกว่าคุณปู่อาซิโม ประสิทธิภาพไปไกล ว่องไว ยืด หยุ่น ทน กว่าอาซิโมที่ทำได้แค่เดินย่องๆ ในวันนั้นหลายเท่า แต่สิ่งหนึ่งที่ยังไม่เปลี่ยนไปคือ หุ่นยนต์และจักรกลในวันนี้ ยังคงมี ‘ผิวสัมผัส’ ที่แข็งแห้ง เย็นชืด ไม่น่าจับ และคงไม่มีความสามารถที่จะ ‘รู้สึก’ ถึงร้อนถึงหนาวถึงนุ่มนิ่ม และไม่ฟินยามสัมผัสหมอนหรือแมวอย่างที่ผมรู้สึกเป็นแน่
แต่แล้วเมื่อสัปดาห์ก่อน ผมก็ได้รู้จักกับสิ่งที่ทำลายความเชื่อทั้งหมดที่ว่ามา
Sensorized Skin คือเทคโนโลยีที่ทำให้หุ่นยนต์ ‘รู้สึกรู้สา’ เทคโนโลยีนี้ทำให้เปลือกนอกของหุ่นยนต์ไม่ได้เป็นเพียง ‘เกราะหุ้มเครื่อง’ อีกต่อไป แต่จะกลายเป็นผิวหนังมีความสามารถรับรู้การสัมผัส และแปลงสัมผัสให้กลายเป็นข้อมูล ส่งไปยังส่วนควบคุม – ว่าง่ายๆ ผิวของหุ่นยนต์ กำลังจะมีคุณสมบัติใกล้เคียงกับที่ผิวมนุษย์มี
Sensorized Skin นี้ถูกพัฒนาโดย MIT ด้วยวัสดุที่ยืดหยุ่นและคืนตัวได้แบบสิ่งมีชีวิต บวกกับการออกแบบที่อ้างอิงวิธีการของการทอผ้าและการตัดกระดาษ Kirigami ในแบบญี่ปุ่น
ส่วนคุณสมบัติของมันนั้น Daniela Rus นักวิจัยด้าน Robotics แห่ง MIT บอกให้เราลองจินตนาการง่ายๆ เวลาที่เราหลับตา เราสามารถรับรู้การมีอยู่ของโลกรอบตัวได้ เพราะผิวหนังสามารถประกอบสร้างมันมาขึ้นในหัว การตอบโต้จากผิวหนังทำให้เราสามารถรับรู้ได้ว่าห้องนี้กว้างประมาณไหน เรากำลังสัมผัสกับวัตถุอะไรตรงหน้า หรือเรากำลังนั่งอยู่ตรงไหนในห้อง นั่นคือความสามารถที่ทีมของเธออยากนำมาไว้ในหุ่นยนต์ ซึ่งแต่เดิมการทำให้หุ่นยนต์มีคุณสมบัติที่ว่า ต้องสร้างระบบขนาดมหึมาและทำงานร่วมกับเทคโนโลยีกล้องจับการเคลื่อนไหวที่ยุ่งยากซับซ้อน
พอมีเทคโนโลยีนี้ การรับรู้และโต้ตอบของหุ่นยนต์จึงไม่จำกัดอยู่แค่ทางภาพหรือชุดคำสั่ง แต่สามารถนำข้อมูลจาก ‘ความรู้สึก’ ทางสัมผัส ไปควบคุมการเคลื่อนไหวโต้ตอบได้ละเอียดซับซ้อนและมีทิศทางที่ไม่จำกัด ที่สำคัญเซนเซอร์ผิวจำลองนี้ทำจากวัสดุที่หาได้ทั่วไปในทุกห้องแล็บ แถมมีวิธีการทำที่ง่ายและเร็ว
คราวหน้าถ้ามีงานจับมือหุ่นยนต์อีก อย่าลืมว่าหุ่นยนต์อาจรู้ได้แล้วว่ามือของเรานุ่มและแฉะ และอย่าเผลอบีบมือแน่นจนหุ่นยนต์เจ็บ เพราะมันอาจจะชกกลับได้
นวัตกรรมที่ทำให้หุ่นยนต์มีเนื้อหนัง ไม่ได้มอบสิทธิ์ทางความรู้สึกให้หุ่นยนต์เพียงฝ่ายเดียว มันยังมอบความรู้สึกที่ดีที่มนุษย์มียามปฏิสัมพันธ์กับหุ่นยนต์หรือจักรกล
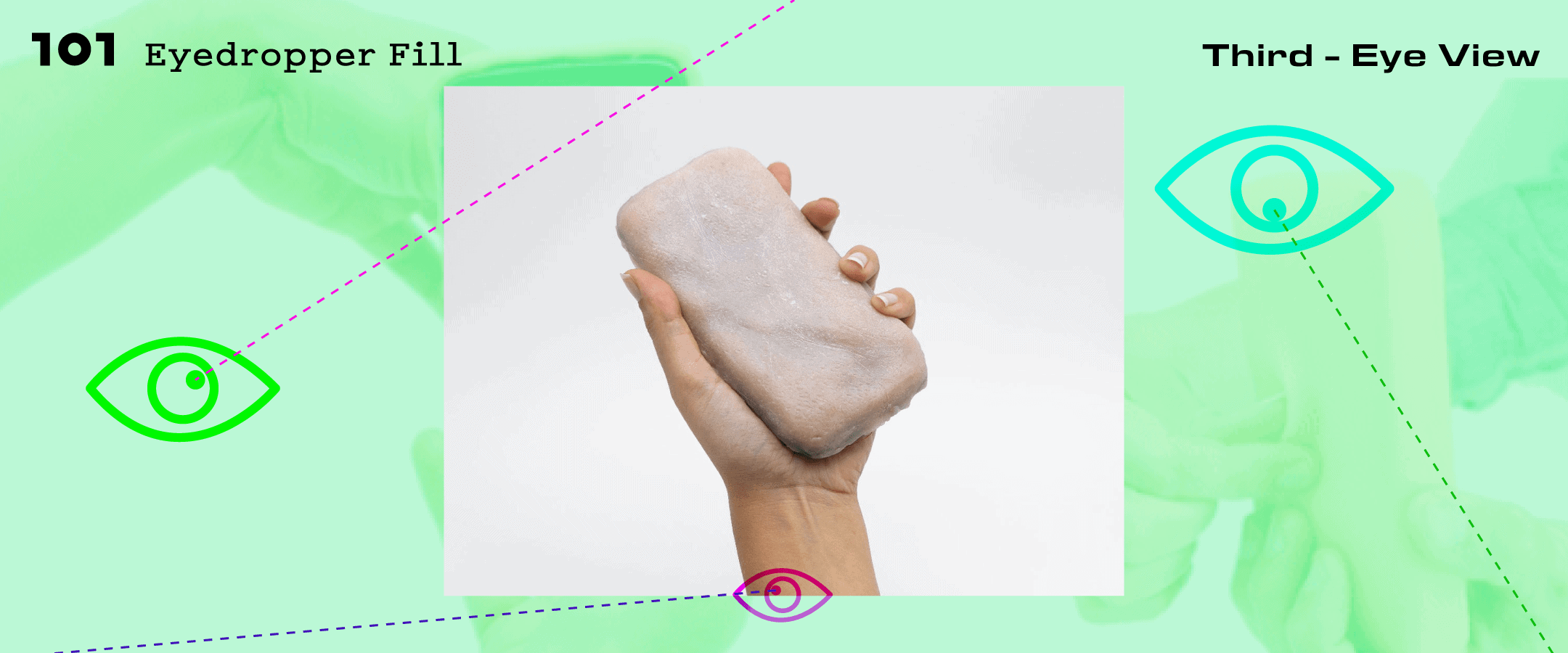
ความคิดนี้เกิดขึ้นเมื่อแรกเห็นโปรเจ็กต์ Skin-On Interface ดูเผินๆ อาจคิดว่ามันคือก้อนเนื้อจำลองไว้หลอกให้เพื่อนขนลุกเล่น หรือเคสมือถือสมาร์ทโฟนที่ทำจากซิลิโคนนุ่มๆ เพื่อให้ตกไม่แตก แต่ไม่ใช่ เพราะไอเดียของโปรเจ็กต์นี้คือ “เราจะสามารถมีปฏิสัมพันธ์กับมือถือหรืออุปกรณ์เทคโนโลยี ในรูปแบบที่เรามีกับมนุษย์ได้มั้ย ?”

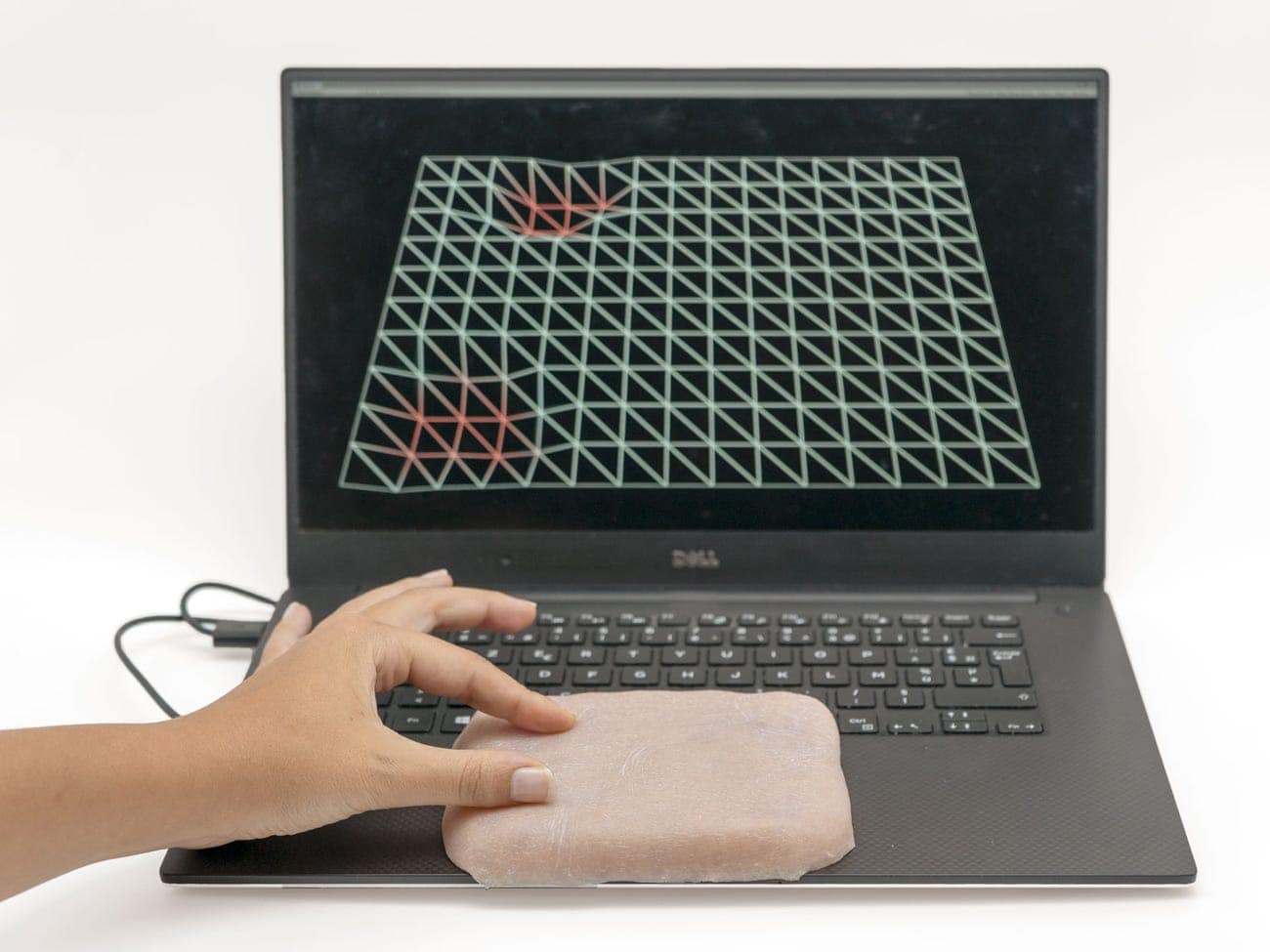
ปฏิสัมพันธ์แบบ ‘มนุษย์ๆ’ ที่ว่าหมายถึง การใช้มือหยิก เคาะ ดีด ลูบไล้ ไปจนถึงใช้ปลายนิ้วจั๊กจี้อุปกรณ์เทคโนโลยีของเรา และแปลงค่าการกระทำเหล่านั้นให้กลายเป็นชุดคำสั่ง

เช่น ถ้าเราอยากเร่งเสียงเพลงจากมือถือ เราอาจหยิกและบิดผิวหนังของมันแทนการกดปุ่มเร่งเสียง, กดปุ่ม Haha ให้โพสต์ของเพื่อนด้วยการจั๊กจี้ตัวเครื่อง, เราอาจหยิกหรือตีแรงๆ ที่เครื่อง เพื่อบอก Siri ว่าเราไม่พอใจผลการค้นหา โดยกลไกเบื้องหลังไอเดียต้นแบบนี้คือเซนเซอร์ที่รับรู้แรงและท่าทางที่ผิวหนังจำลองถูกกระทำ ก่อนจะแปลงเป็นรหัสเพื่อทำให้อุปกรณ์นั้นๆ เข้าใจคำสั่ง
สองโปรเจ็กต์นี้ฟ้องว่า ความรู้สึก การสัมผัส และปฏิสัมพันธ์ในแบบ ‘มนุษย์ๆ’ ยังคงเป็นสิ่งพิเศษ และดูเหมือนจะเป็นหนึ่งในไม่กี่ความสามารถที่จักรกลปัญญาประดิษฐ์ยังคงไล่ตามเรา
จินตนาการถึงวันที่มนุษย์ถูกล้อมหน้าล้อมหลังด้วยเทคโนโลยี มือของเราสัมผัสจอภาพล่องหน เสียงของเราโต้ตอบกับสมาร์ทโฮมที่ไม่มีหน้าตา ขีวิตของเราต้องปฏิสัมพันธ์กับจักรกลที่แห้ง เย็น ชืดตั้งแต่เช้าจรดเย็น ในวันนั้นสิ่งที่มนุษย์โหยหามากที่สุด อาจเป็นการ ‘สัมผัสแบบมนุษย์ๆ’ นี่เอง
น่าสนใจมากว่า การออกแบบจะนำวิธีปฏิสัมพันธ์อย่างเป็นมนุษย์เหล่านี้ ไปรวมร่างเข้ากับเทคโนโลยี หุ่นยนต์ และจักรกลแห่งอนาคต เพื่อทดแทนสัมผัสที่มนุษย์ขาดแคลนอย่างไรในวันนั้น?



